H5T2vaiheiluri
Tehdään mieluummin suoraan mukaillen ohjetta:
Contents
http://math.aalto.fi/opetus/MatOhjelmistot/2014kevat/L/ODEohje.html
ODEfunktio "heiluri" voidaan määritellä myös funktiokahvana:
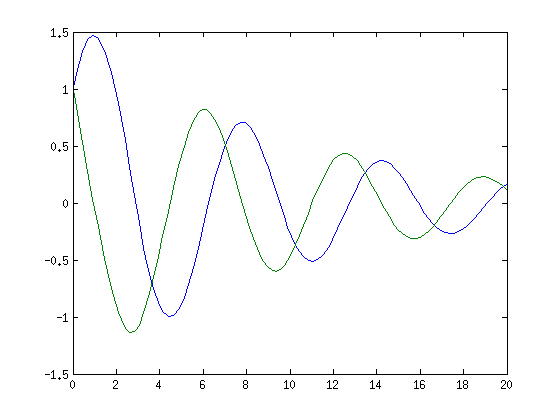
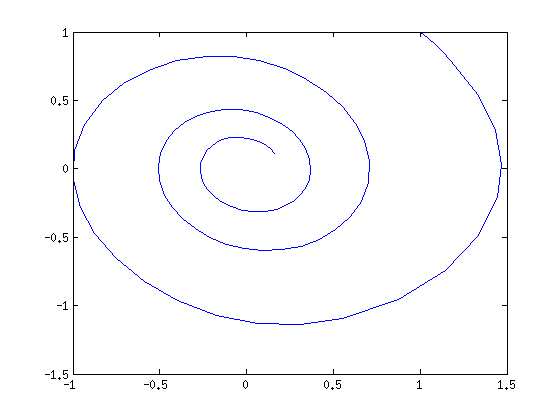
k=1; c=0.1; % Vaimennusvakio, Vaihdellaan. c=0.2; % vaiheiluri=@(t,y) [y(2);-k*sin(y(1))-c*y(2)] Tvali=[0 20]; y0=[1;1]; % Alkukulma=1, alkukulmanopeus=1. [T,Y]=ode45(vaiheiluri,Tvali,y0); % ode45 havaitsee funktiokahvan, sille % ei tarvitse sitä enää @-merkillä % ilmoittaa. (Muistisääntö 1 @-merkki % joko määrittelyssä tai kutsussa, ei molemmissa.) size(T) % Aikapistevektorin pisteiden lkm. size(Y) % Kaksisarakkeinen matriisi, ratkaisut y1 ja y2 aikapisteissä t. plot(T,Y(:,1),T,Y(:,2)) % Aikakuva: heilahduskulma ja kulmanopeus ... % ajan funktiona figure plot(Y(:,1),Y(:,2)) % Faasikuva: Kulmanopeus kulman "funktiona" ... % eli käyrä (Theta(t),omega(t)), 0< t < 20).
vaiheiluri =
@(t,y)[y(2);-k*sin(y(1))-c*y(2)]
ans =
101 1
ans =
101 2
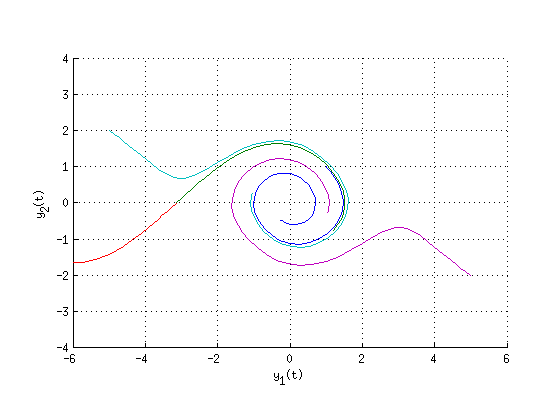
Kriittset pisteet samat kuin vaimentamattomalla
sin(y1)=0, y2=0, siis y1-akselilla n*pi.
3 eri trajektorityypppiä:
close all ya0=[1;1]; % Pieni alkukulma/nopeus -> heilahtelee edestakaisin yb0plus=[-pi;0.01]; % Kriittinen alkutilanne (Heiluri pysytyasennossa+) yb0miinus=[-pi;-0.01]; % Kriittinen alkutilanne (Heiluri pysytyasennossa-) yc0=[-5;2]; % Suuret alkuarvot, heiluri pyörii ympäri yd0=[5;-2]; % ... toisinpäin Tvali=[0 10]; [ta,Ya]=ode45(vaiheiluri,Tvali,ya0); [tbplus,Ybplus]=ode45(vaiheiluri,Tvali,yb0plus); [tbmiinus,Ybmiinus]=ode45(vaiheiluri,Tvali,yb0miinus); [tc,Yc]=ode45(vaiheiluri,Tvali,yc0); [td,Yd]=ode45(vaiheiluri,Tvali,yd0); hold on plot(Ya(:,1),Ya(:,2),Ybplus(:,1),Ybplus(:,2),Ybmiinus(:,1),Ybmiinus(:,2),... Yc(:,1),Yc(:,2),Yd(:,1),Yd(:,2)) axis equal; axis([-6 6 -4 4]) xlabel y_1(t); ylabel y_2(t) grid on
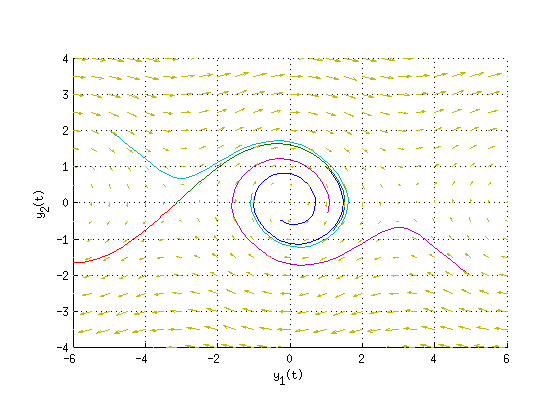
Hiiri avuksi, samalla suuntakentta:
[y1,y2]=meshgrid(-6:0.5:6,-6:0.5:6); % Koordinaattihilapisteistö dy1=y2; dy2=-sin(y1); % Heiluridiffyhtälöryhmän derivaatat hilapisteissä quiver(y1,y2,dy1,dy2) % Suuntanuolet hilapisteisiin derivaattojen suuntaan. % Toden totta, näillä 3:lla koodirivillä saat suuntakentän!
Tahan jatkoksi se valmis ginput-skripti pienin virityksin ...
Odottakoon toistaiseksi. (Toki voit tehdä pplanella)