To use CSPlotter you need to download the file CSPlotter.m and put it in your current working directory in Mathematica. (You may also view the code here.) From the Mathematica prompt, you can then load it by typing
<<CSPlotter.m |
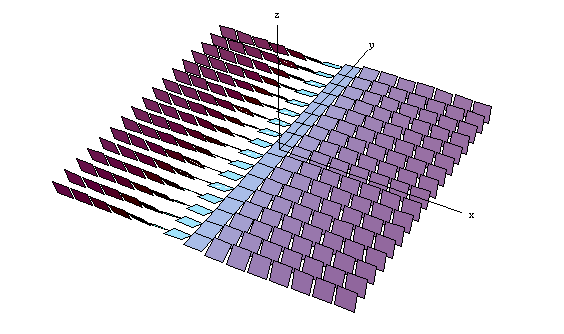
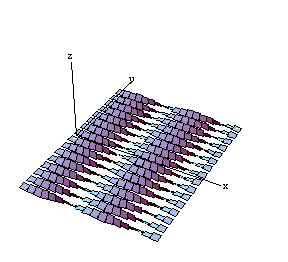
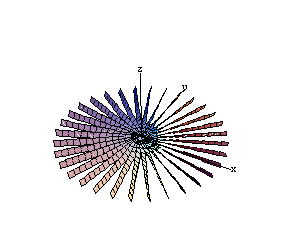
Once you have loaded CSPlotter.m, it will provide the command contactelement(pos, v, s) that produces a small tile at pos, normal to v, and of size s. Since at each point in R3 a contact structure is a two dimensional subspace of the tangent space, such tiles can be used to visualize a contact structure in R3 at one point. (The tile shows the orientation of the vector subspace.) By plotting many such tiles, one can visualize the whole contact structure. For example, the standard contact structure ker dz-x dy is visualized using the commands:
xmin = -3.5; xmax = 3.5; dx = (xmax - xmin)/14;
ymin = -3.5; ymax = 3.5; dy = (ymax - ymin)/16;
size = dy;
normal[x_, y_, z_] = {0, -x, -1};
Table[contactelement[{x, y, 0}, normal[x, y, 0], size],
{x, xmin, xmax, dx},
{y, ymin, ymax, dy}];
out = Show[%, coords[xmax + 1, ymax + 1, 3.4], Boxed -> False]
|
CSPlotter has been tested with Mathematica 5.0.1.0.
More examples
- Standard structures
[.nb]
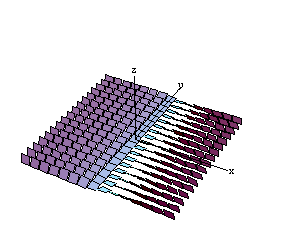
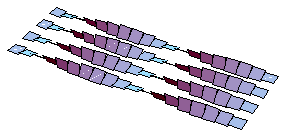
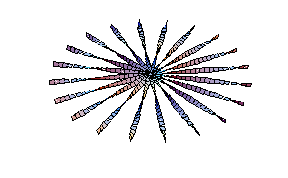
- Alternative representation of the standard structures
[.nb]
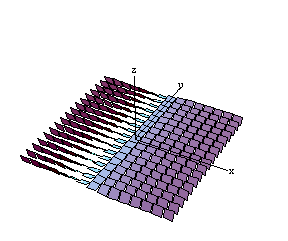
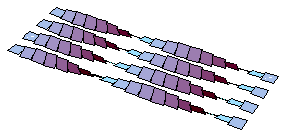
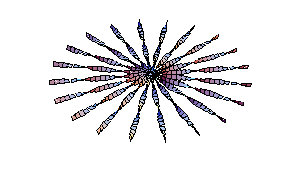
- Zoom in of the alternative representation
[.nb]
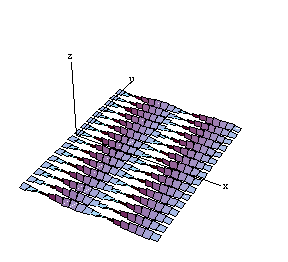
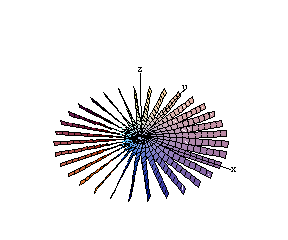
- Radial symmetric structures
[.nb]
- Contact structure tight at infinity
[.nb]
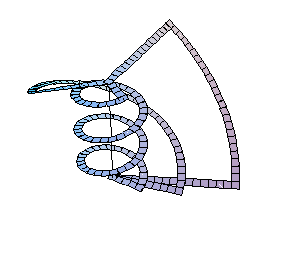
- Illustration of Chow's theorem; any two points in the radial
symmetric contact structure can be connected
[.nb]
Something missing?
All comments, corrections, additions, and improvements are very welcome. For example, if you have plotted another contact structure with CSPlotter, I could put it on this page. My email is matias.dahl
Originally, I wrote the routines in CSPlotter to plot contact structures for my Master's thesis, Contact and symplectic geometry in electromagnetics. Variants of some of the above images were used in this paper in PIER.